Sense
An experimental prototyping platform to test and evaluate the vision of home robotics
Developed at Skyborn Research BV in Curitiba, Brazil.
What this is about
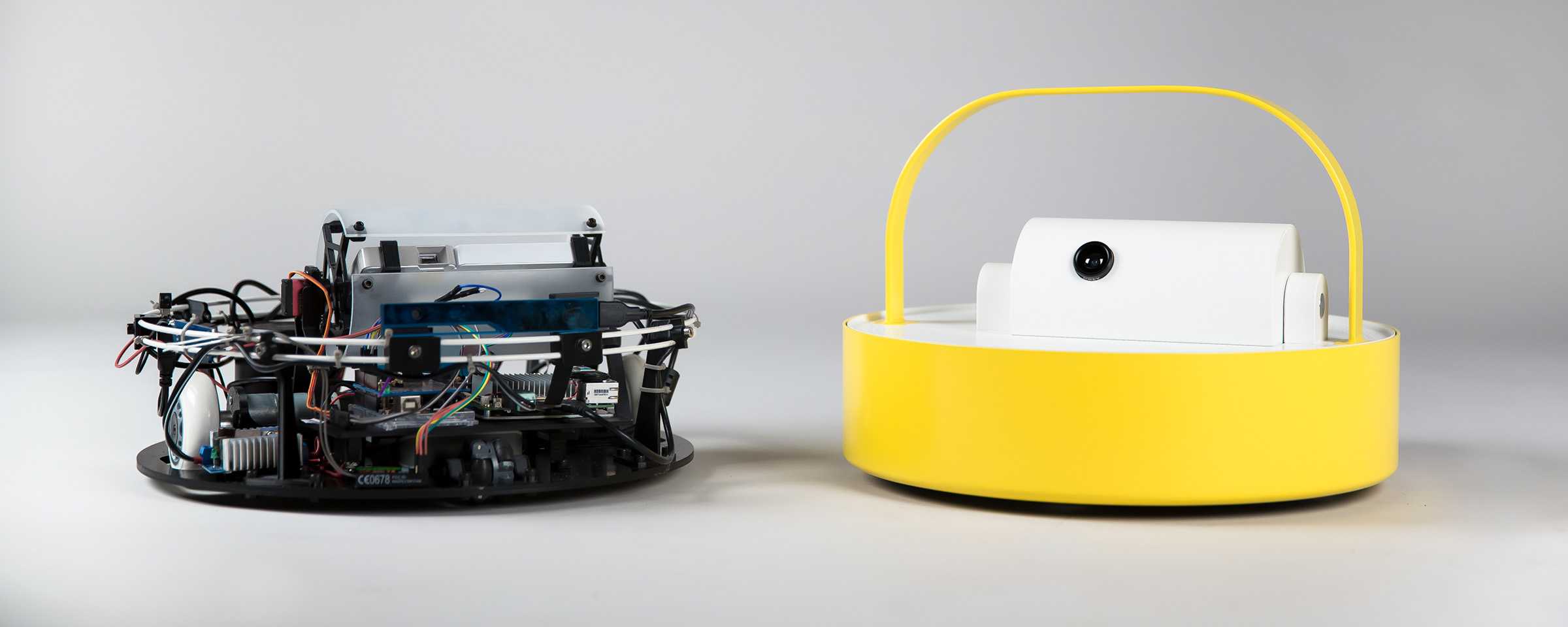
Sense is a small robot, that will cost less than EUR 1000 to build. If you put it together, you will have something like a remote control car, equipped with a quad core computer, a stereo camera, audio input and output and a video projector. You'll be able to use it as a basic setup and build your personal project on top.
A little backstory
The vision of home robotics is ubiquitous. As a transdisciplinary team of designers, technologists and researchers, we were looking for a way to prototype the concepts we've been working on.
The question becomes: how do you design AI? How can we build behavioural interfaces? One common example is robot navigation.
We want future robots to navigate through our apartments savely, in a manner that is understandable and predictable for humans. We want them to deal gracefully with unexpected obstacles and be efficient and save.
One of our key interests is Heuristic Problem Solving, which uses concepts from cognitive science to implement a decision process similar to that of humans. Our goal is to use HPS as a general, cognitively inspired decision-making framework and use Thia as a use case and testing environment to gain insights through practical experiences.
That's why Thia is an experimental prototyping platform to test and evaluate the vision of home robotics.
What you will be able to do
Fully loaded, Thia offers the following hardware capabilities:
- 3D imaging
- mobile projection mapping (up to a certain extent)
- 3 channel audio input (good for locating sound sources)
- audio playback
- mobile, untethered use for about an hour(...ish - depends on your use)
What you will need
Quick disclaimer: One of our main goals was to build Thia as both low-budget and easy-to-use as possible. At some points compromises had to be made in order to a) stay in a reasonable budget or b) make it easy to assemble and use.
All of the components can be bought online on Amazon, eBay, Banggood, Mouser etc. - prices might vary.
This is just a rough rundown of what key components were used so you get the idea. Check out the parts list for a more detailled list with links.
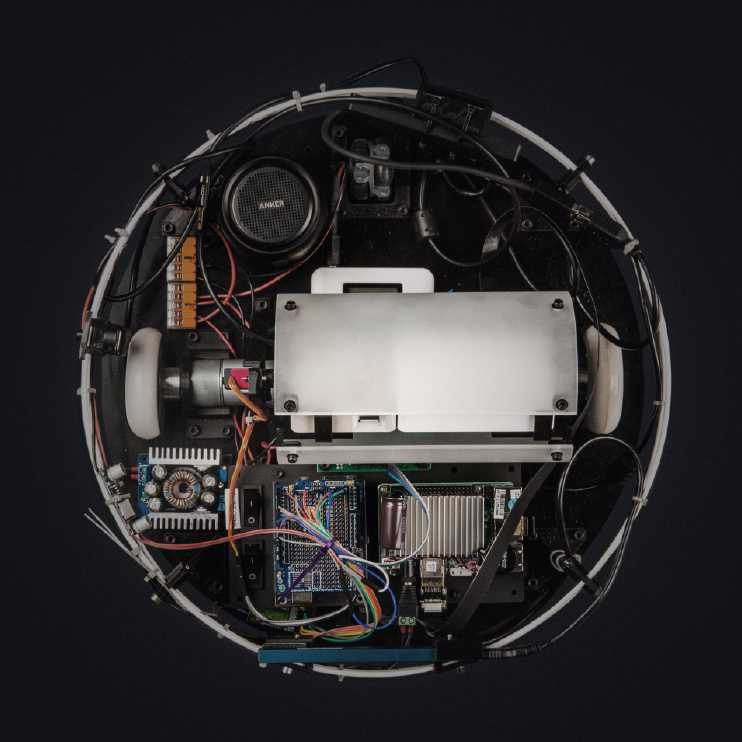
Computing
- UpBoard
- Arduino Uno
Input
- RealSense R200
- USB Microphones
- RC Receiver
Output
- RD02 Robotic Drive System
- Servo Motor
- Anker Soundcore
- USB soundcard
- PicoPro Projector
Power
- Laptop Powerbank
Custom Parts
In order to hold everything together we went with a round base plate (in size similar to vacuum cleaning robots) with some mounting holes in a grid and 3D printed parts made from PLA. We used an Ultimaker 3 - which means, you can basically print them on any basic FDM printer.
Most parts were designed with quite broad tolerances so you shouldn't have that big of a problem to make it all fit together nicely.
The shielding for the projector out of acrylic glass is optional - its mainly meant to protect the projector from dust and physical damage. We will upload a 3D file without the mounts for it later.
Getting started
For getting started head over to the specific readme's on Software and Hardware.
TODO
- Prepare 3D files for milling
- Create schematic
- Create 3D files for milling
License
This project is released under the MIT License - you are free to do whatever you want with it - as long as you don't plan on subdueing humanity or any other crazy stuff, we're fine with it.
You are not legally bound to it, but it would be nice if you credit this project when creating something with it - and please tell us! We would love to see what you create!